Aucun résumé des modifications |
|||
| Ligne 25 : | Ligne 25 : | ||
{| class="wikitable" | {| class="wikitable" | ||
|- style="background-color:#f0f0f0; " | |- style="background-color:#f0f0f0;border-bottom:solid 2px" | ||
! style="width: 5%;"|Item | ! style="width: 5%;"|Item | ||
! style="width: 25%;" |Référence | ! style="width: 25%;" |Référence | ||
! style="width: | ! style="width: 13%;" |Distributeurs | ||
!Remarques | !Remarques | ||
|- | |- | ||
| Ligne 38 : | Ligne 38 : | ||
... | ... | ||
| | | | ||
|- | |-style="background-color:#f0f0f0;border-bottom:solid 2px" | ||
|U2 | |U2 | ||
|IMU GY87 | |IMU GY87 | ||
| Ligne 45 : | Ligne 45 : | ||
... | ... | ||
| | | | ||
|-style="background-color:#ffffcc | |-style="background-color:#ffffcc" | ||
|B1 | |B1 | ||
|Batterie LiPo 3.7V 110mAh avec JST | |Batterie LiPo 3.7V 110mAh avec JST | ||
| Ligne 70 : | Ligne 70 : | ||
|Buzzer | |Buzzer | ||
|[https://fr.aliexpress.com/item/4000148640191.html?spm=a2g0o.order_list.order_list_main.27.24985e5bosnGNT&gatewayAdapt=glo2fra AliExpress] | |[https://fr.aliexpress.com/item/4000148640191.html?spm=a2g0o.order_list.order_list_main.27.24985e5bosnGNT&gatewayAdapt=glo2fra AliExpress] | ||
|-style="background-color:#ffffcc;" | |-style="background-color:#ffffcc;border-bottom:solid 2px" | ||
|PCB | |PCB | ||
|Circuit imprimé BR Micro Avionic | |Circuit imprimé BR Micro Avionic | ||
|[https://shop.berryrocket.com/ Berry Factory Shop] | |[https://shop.berryrocket.com/ Berry Factory Shop] | ||
|} | |} | ||
== Notice de montage == | == Notice de montage == | ||
Version du 13 janvier 2024 à 18:14


Généralités
La carte Micro Avionic permet d'acquérir et d'enregistrer les paramètres de vol d'une fusée. Elle repose sur 2 modules principaux :
- Une carte RP2040 Zero qui est une version miniature de la carte Raspberry Pico mais qui utilise le même microcontrôleur. Cette carte est programmable en C++ ou en Micropython.
- Une carte GY87 à10 degrés de liberté comprenant un capteur de pression, un accéléromètre 3 axes, un gyromètre 3 axes et un magnétomètre 3 axes
Ces 2 modules sont disponibles montés, ils doivent être soudés sur une petite carte mère dédiée avec quelques composants périphériques comme un buzzer qui permet de connaitre l'état de fonctionnement de la fusée et un connecteur d'alimentation pour la batterie.
En exploitant l'ensemble des capteurs de cet ensemble, il est possible d'enregistrer les de restituer la trajectoire de votre fusée en 3 dimensions et de mesurer l'altitude atteinte !
Schématique
Le schéma des modules RP2040 et GY87 sont disponibles sur le WEB mais il n'est pas nécessaire de les comprendre en détail pour monter votre carte BR Micro Avionic dont le schéma général est présenté ci-dessous :


La carte BR Micro Avionic est alimentée par une batterie LiPo de 3,7V / 110mAh qui dispose d'un connecteur JST femelle au pas de 1.25mm. Ainsi, le connecteur mâle J1 de la carte permet de connecter la batterie et d'alimenter les modules RP2040 et GY87 via la diode Schottky D1 (1N5819).
Celle-ci est très importante car elle protège la batterie lorsque vous alimentez la carte RP2040 Zero à l'aide d'un câble USB. Les résistances R1 (10kΩ) et R2 (10kΩ) divisent la tension d'alimentation par 2 et l'applique sur une des entrées analogiques du RP2040 (ADC2). Il est ainsi possible de la mesurer par logiciel. Le module GY87 qui contient l'ensemble des capteurs communique avec le module maitre RP2040 à l'aide d'un bus I2C qui dispose d'un signal d'horloge (SCL) et de données (SDA). Enfin, le buzzer BZ1 est relié à la sortie GP0 du module RP2040 et permet de générer des signaux sonores très utiles pour connaitre l'état de fonctionnement de la carte même lorsqu'elle se trouve à l'intérieur du corps de la fusée.
Le tableau ci-dessous regroupe l'ensemble des composants nécessaires pour réaliser la carte BR MicroAvionic ainsi que quelques liens vers des distributeurs possibles.
| Item | Référence | Distributeurs | Remarques |
|---|---|---|---|
| U1 | RP2040 Zero | Amazon
... |
|
| U2 | IMU GY87 | AliExpress
... |
|
| B1 | Batterie LiPo 3.7V 110mAh avec JST | AliExpress | Ces composants sont disponibles chez les distributeurs indiqués mais souvent en quantité ou avec des minimum de commande ou des frais de livraison dissuasifs.
Nous vous recommandons pour cela d'acheter le kit BR Micro Avionic qui comprend l'ensemble de ces composants sur notre boutique en ligne. Cette démarche contribuera à ne pas acheter des composants qui ne vous servirons pas et à soutenir le développement d'autres produits au sein de l' association Berry Factory ! |
| J1 | Connecteur JST Male coudé 2.5mm 2p | AliExpress | |
| D1 | Diode Schottky 1N5819 | RadiosparesAmazon | |
| R1, R2 | Résistance 10k, 1/4W | AliExpressAmazonRadiospares | |
| BZ1 | Buzzer | AliExpress | |
| PCB | Circuit imprimé BR Micro Avionic | Berry Factory Shop |
Notice de montage

La présente notice décrit le montage des composants contenus dans le kit de la carte BR Micro Avionic que vous pouvez vous procurer sur notre site. Vous pouvez également acheter les composants chez vos distributeurs habituels. Dans ce cas, il vous faudra router un circuit avec un outil de CAO électronique et réaliser le PCB (Print Circuit Board ou Circuit Imprimé) à partir du schéma précédent.
Lorsque que l'on soude des composants sur une platine, il est d'usage de commencer par les éléments les moins hauts. Il est également recommandé de dégraisser le PCB avec de l'alcool ou de l'acétone afin de faciliter la soudure des composants. Le bon fonctionnement de votre carte dépend du soin apporté à la réalisation des soudures. Si vous n'êtes pas habitué à réaliser des soudures, n'hésitez pas à vous entrainer sur une platine à pastilles au préalable.
Montage du module RP2040-Zero
Il est important que le module RP2040-Zero soit placé bord à bord avec le PCB (Fig. 1) afin qu'il s'insère plus tard au mieux dans la case expérience. Pour cela, il est possible de maintenir le module avec du ruban adhésif sur le PCB pendant la réalisation des deux premières soudures (Fig. 2). Celles-ci seront avantageusement réalisées de chaque coté du module, en diagonal (Fig. 3). Après cette opération, le module est ainsi maintenu sur le PCB et le ruban adhésif peut être déplacé pour ne pas gêner la réalisation des autres soudures (Fig. 4 & 5).
-
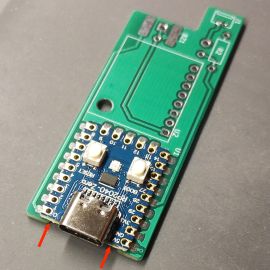
Fig. 1: Placement du RP2040
-
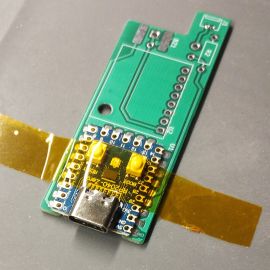
Fig. 2: Maintien du module RP2040
-
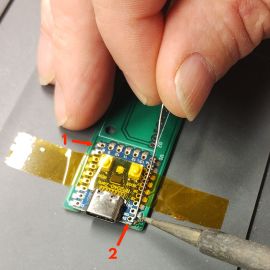
Fig. 3: Soudure des 2 premières pastilles
-
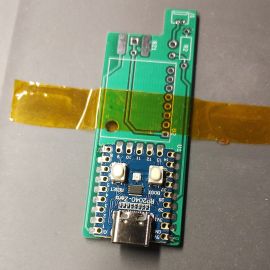
Fig. 4: Module RP2040 en place
-

Fig. 5: Module soudé





Montage du module GY87
Les broches les plus longues de la barrette sécable doivent être insérées du coté composant du module GY87 (Fig. 1). Il est important que la barrette fasse un angle de 90° avec le module (Fig. 2). La soudure de la barrette sur la platine est assez délicate car il faut minimiser la hauteur des soudures (e) (Fig. 3) afin de ne pas gêner, après cette opération, l'insertion de l'ensemble sur le PCB (Fig. 4). Pour terminer, soudez le module GY87 et sa barrette sur le PCB (Fig. 5 & 6).
-
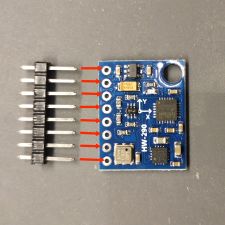
Fig. 1: Positionnement de la barette sécable
-
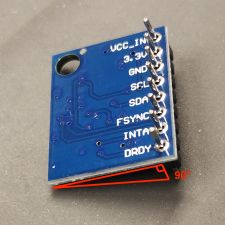
Fig. 2: Placement de la barette
-

Fig. 3: Soudure des broches
-

Fig. 4: Placement du module GY87 sur le PCB
-
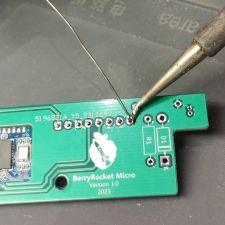
Fig. 5: Soudure du module
-
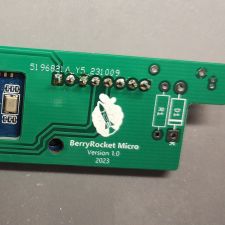
Fig. 6: Module GY87 soudé






Montage des composants passifs
Les composants passifs sont les résistances R1 et R2 ainsi que la diode D1 . Pour ceux-ci il faut au préalable plier leurs pattes à 90° avec une pince plate en veillant à respecter l'écart de 1cm correspondant à la distance entre les pastilles (Fig. 1). Commencez par D1 er R1 en les plaçant sur la face inférieure du PCB. Attention, la diode D1 a un sens de montage, sa cathode est repérée par un anneau plus clair (Fig. 2). R2, quant à elle, doit être soudée sur la face composant (dessus) du PCB (Fig. 3). Après avoir soudé chaque composant passif, coupez leurs pattes avec une pince coupante (Fig. 4).
-
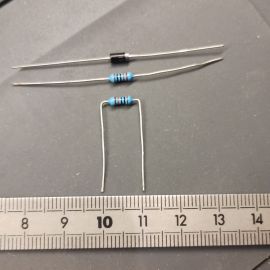
Fig. 1: Pliage des pattes des composants
-
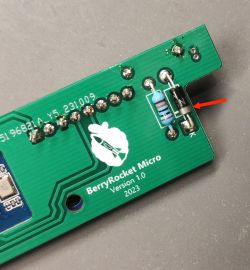
Fig. 2: Placement de D1 et R1
-
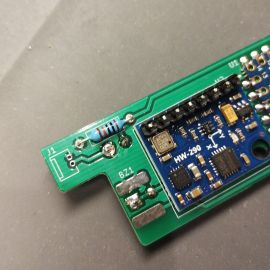
Fig. 3: Placement de R2
-

Fig. 4: Coupe des pattes




Montage du connecteur d'alimentation
Ce petit connecteur J1 est assez fragile, il est recommandé de le coller au préalable sur le PCB avec de la colle cyanoacrylate (super glue) ou bien de la colle époxy bi composante (Araldite) afin qu'il ne se torde pas sous l'effet des connections / déconnections successives. La dépose de la goutte de colle doit s'effectuer avant la soudure du connecteur. Il faut être précis, la colle ne doit pas se répandre à l'intérieur du connecteur ni sur ses broches.
-

Fig. 1: Dépose d'un point de colle sur J1
-

Fig. 2: Mise en place et soudure de J1


Montage du Buzzer
C'est le dernier composant à souder sur le PCB et, comme la diode D1, il possède un sens de montage. Le "+" est visible sur son capot (Fig. 1), la patte en regard doit être soudée sur la pastille indiquée sur la figure 3. Ce composant traversant ne dispose pas de trous pour son placement, il est soudé sur le coté composant du PCB sur 2 pastilles rectangulaires qu'il faut préalablement étamer. Cette opération consiste à déposer de la soudure sur une pastille (Fig. 3) ou tout autre élément métallique comme les pattes du buzzer par exemple (Fig. 2). Pour souder le buzzer il suffit alors de le mettre en place sur le PCB (Attention à bien repérer le +) et de chauffer localement avec le fer à souder. La soudure préalablement déposée sur la pastille et sur les pattes du composant s'uniformise alors pour maintenir ce dernier (Fig. 4).
-

Fig. 1: Repère + du buzzer
-

Fig. 2: Etamage des pattes du buzzer
-
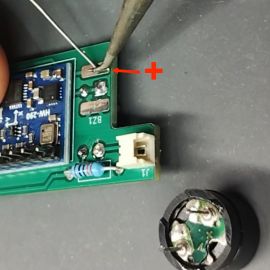
Fig. 3: Etamage des pastilles recevant le buzzer et repairage du +
-

Fig. 4: Soudure du Buzzer




Nettoyage de la carte
Pour un rendu impeccable, il est recommandé de nettoyer le circuit avec du nettoyant pour flux de soudure ou de l'acétone. Ce produit, disponible généralement en bombe et muni d'une brosse (Fig. 1), permet d'enlever toutes les particules de flux et laisser des soudures bien brillantes. Une fois nettoyé, le circuit doit faire l'objet d'un contrôle visuel minutieux à la loupe pour déceler toute soudure défectueuse avant la mise sous tension (Fig. 2 & 3).
-

Fig. 1: Nettoyage du flux de soudure
-
Fig. 2 Soudures du RP2040 à la loupe
-

Fig. 3: D1 et R1 à la loupe



Mise sous tension & Tests
Pour mettre le circuit sous tension il suffit de relier la carte BR Micro Avionic à un PC via un câble USB C. La LED verte présente sur le module GY87 doit alors s'allumer (Fig. 1) et une fenêtre s'ouvre à l'écran (Fig. 2).

Si vous choisissez de programmer votre carte en MicroPython (recommandé) vous devez alors télécharger ce fichier .uf2 (mis à disposition sur le site Raspberry Pico ) et le glisser-déposer dans la fenêtre (Fig. 3). Le RP2040 Zéro se réinitialise automatiquement et vous pouvez alors y déposer votre premier programme de test. Il existe de nombreux environnement de développement pour les cartes basées sur la puce RP2040 mais Thonny est sans doute à privilégier si vous débutez. Bonne programmation !
-
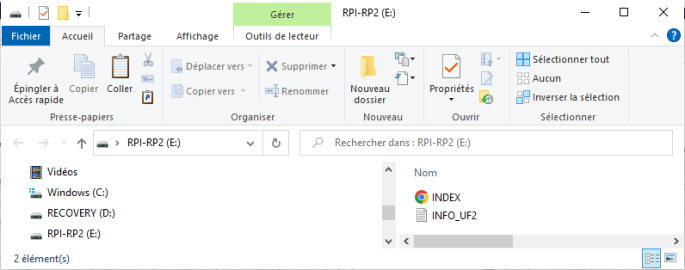
Fig. 2: Fenêtre du RP2040
-
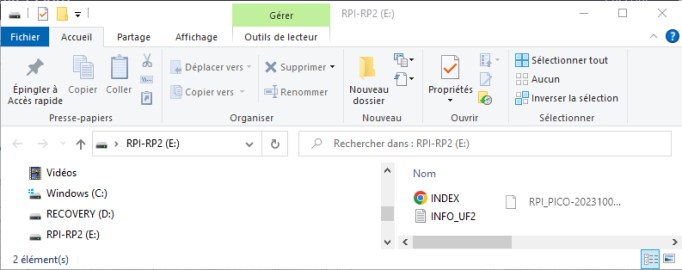
Fig. 3: Glissé déposé du fichier .uf2


Auteur : Nicolas VERDIER pour BerryRocket.com
Licence : CC-BY-NC 4.0